
Autonomous line following vehicle
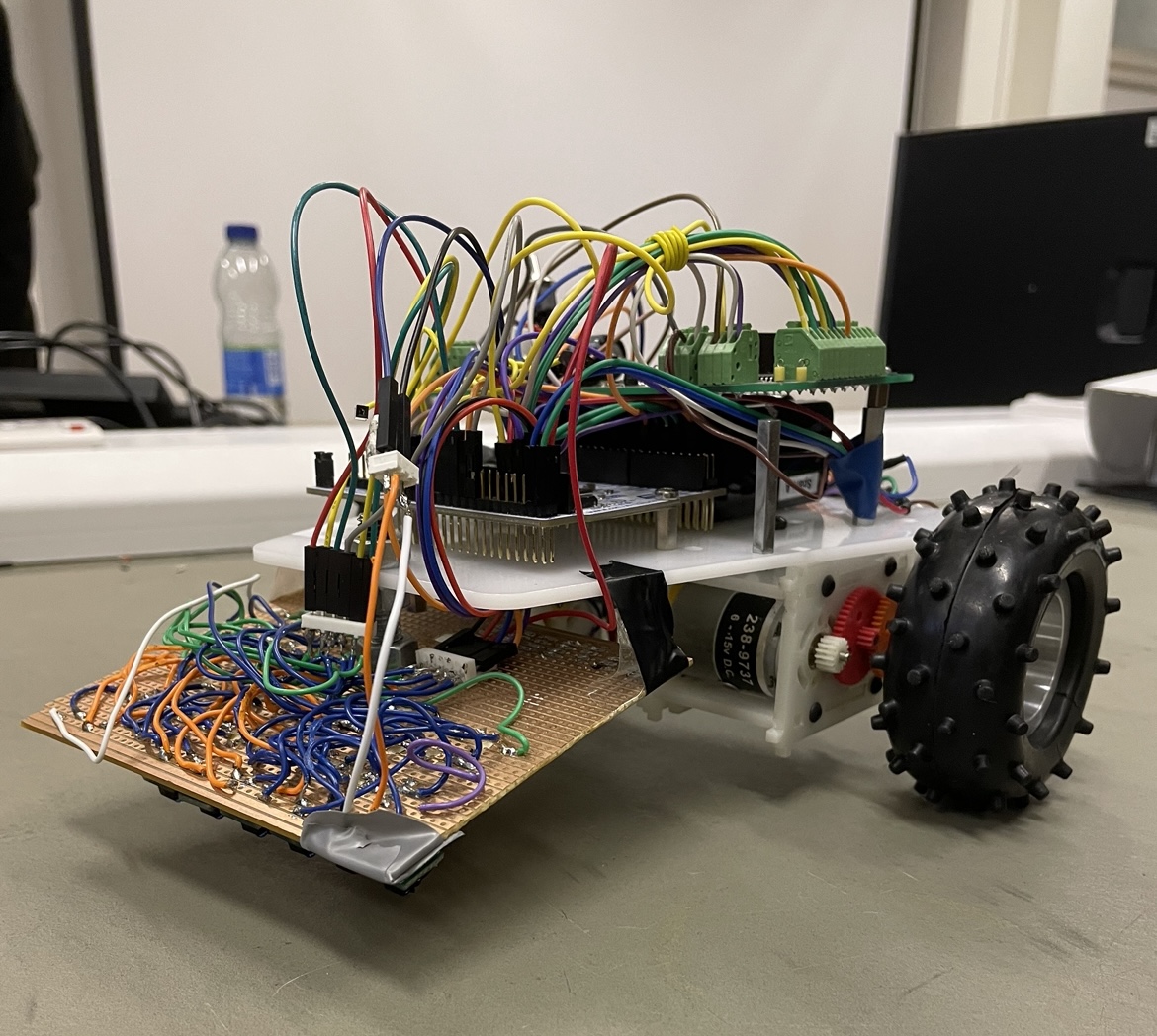
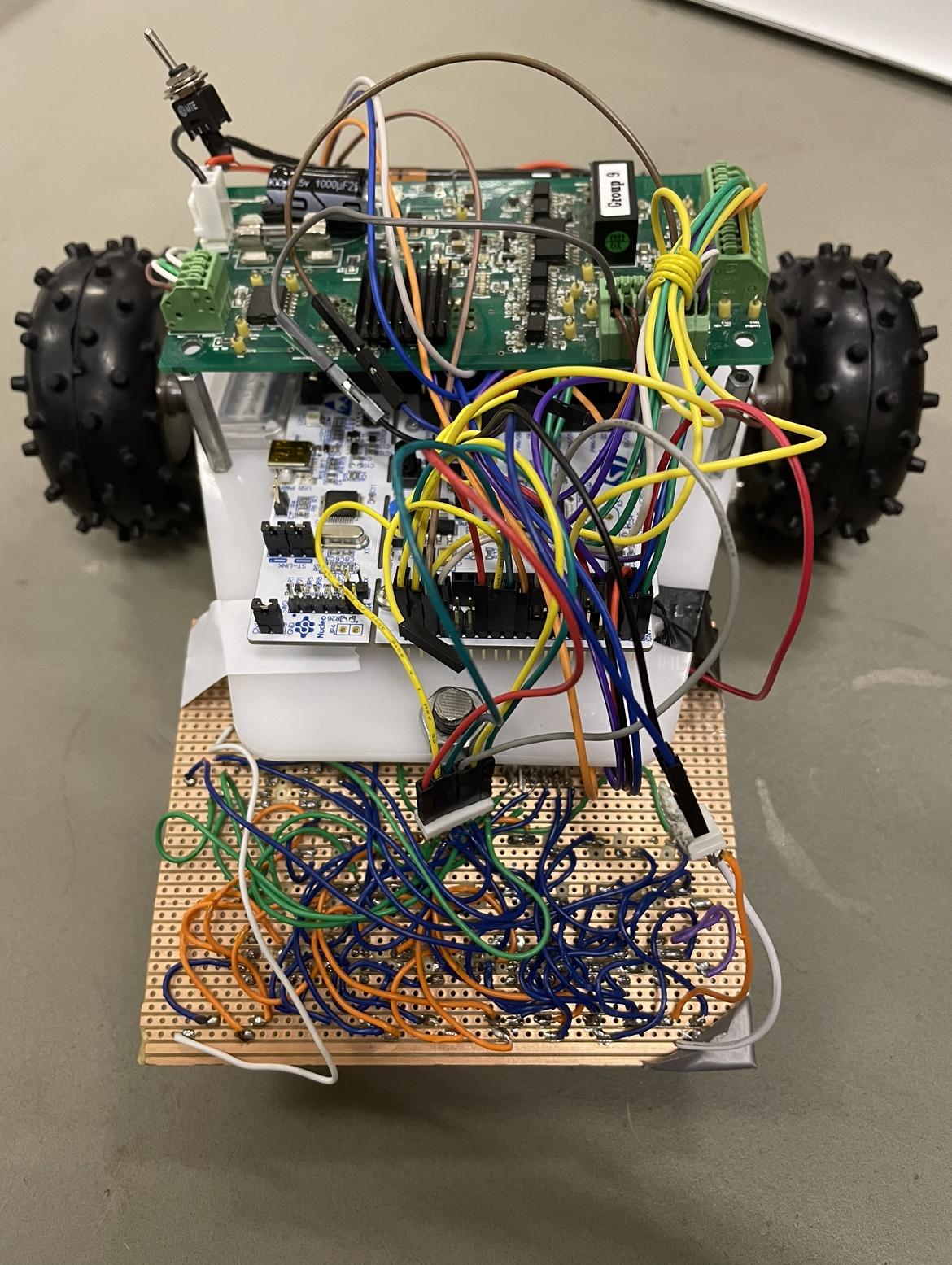
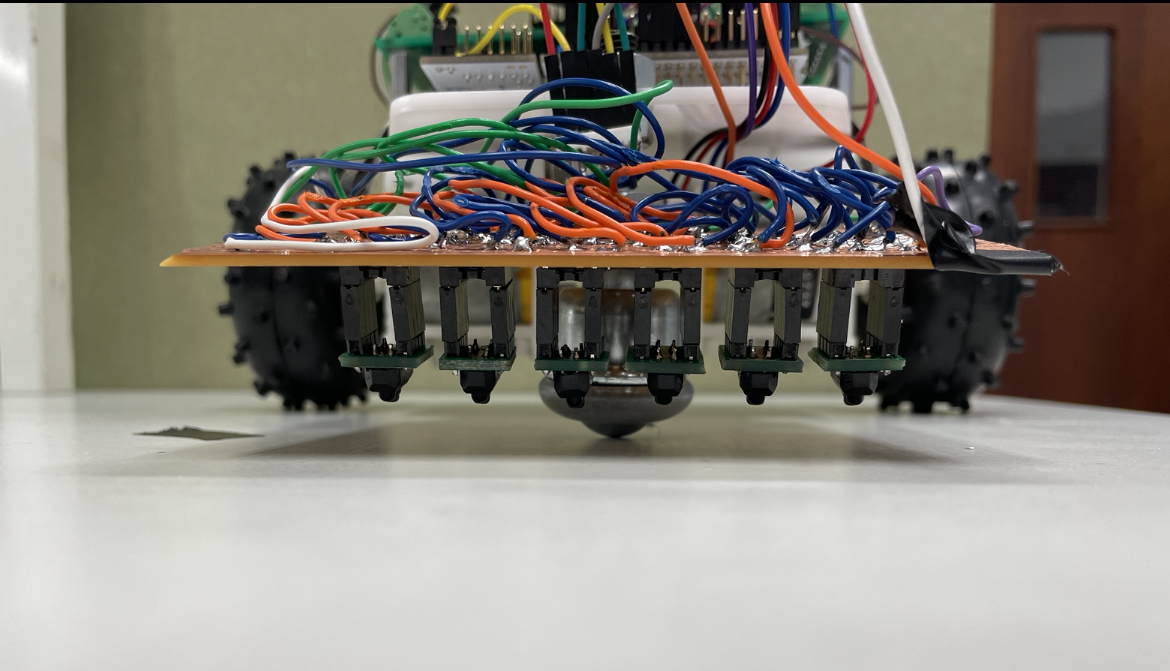
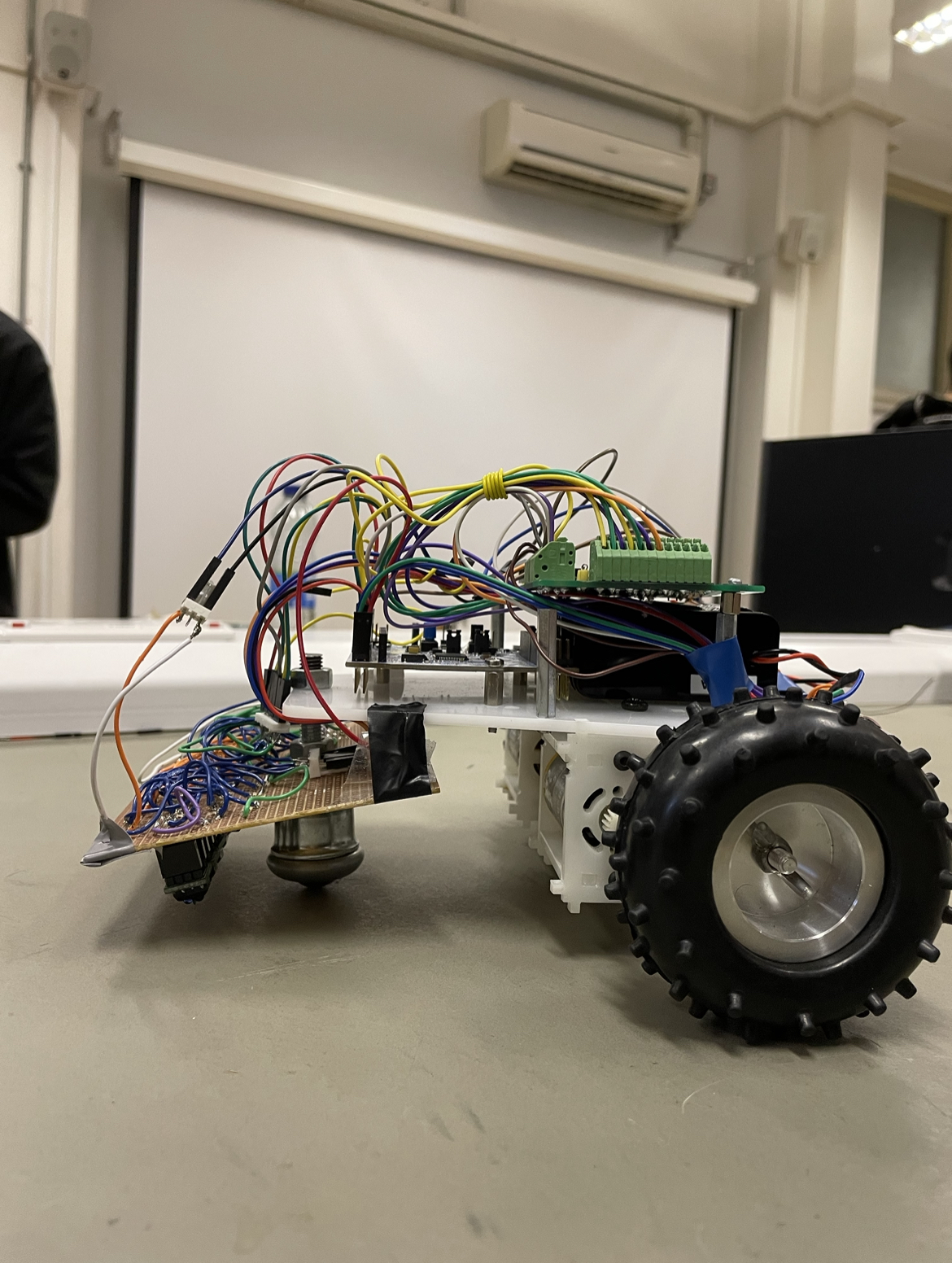
In my second year of undergraduate studies, our team of six developed an autonomous line-following buggy. It utilized sensors to detect a white line on the race track, demonstrating practical application of sensor integration and autonomous navigation techniques.
| Images and Videos of the Buggy |
|---|
 |
 |
 |
 |
 |